
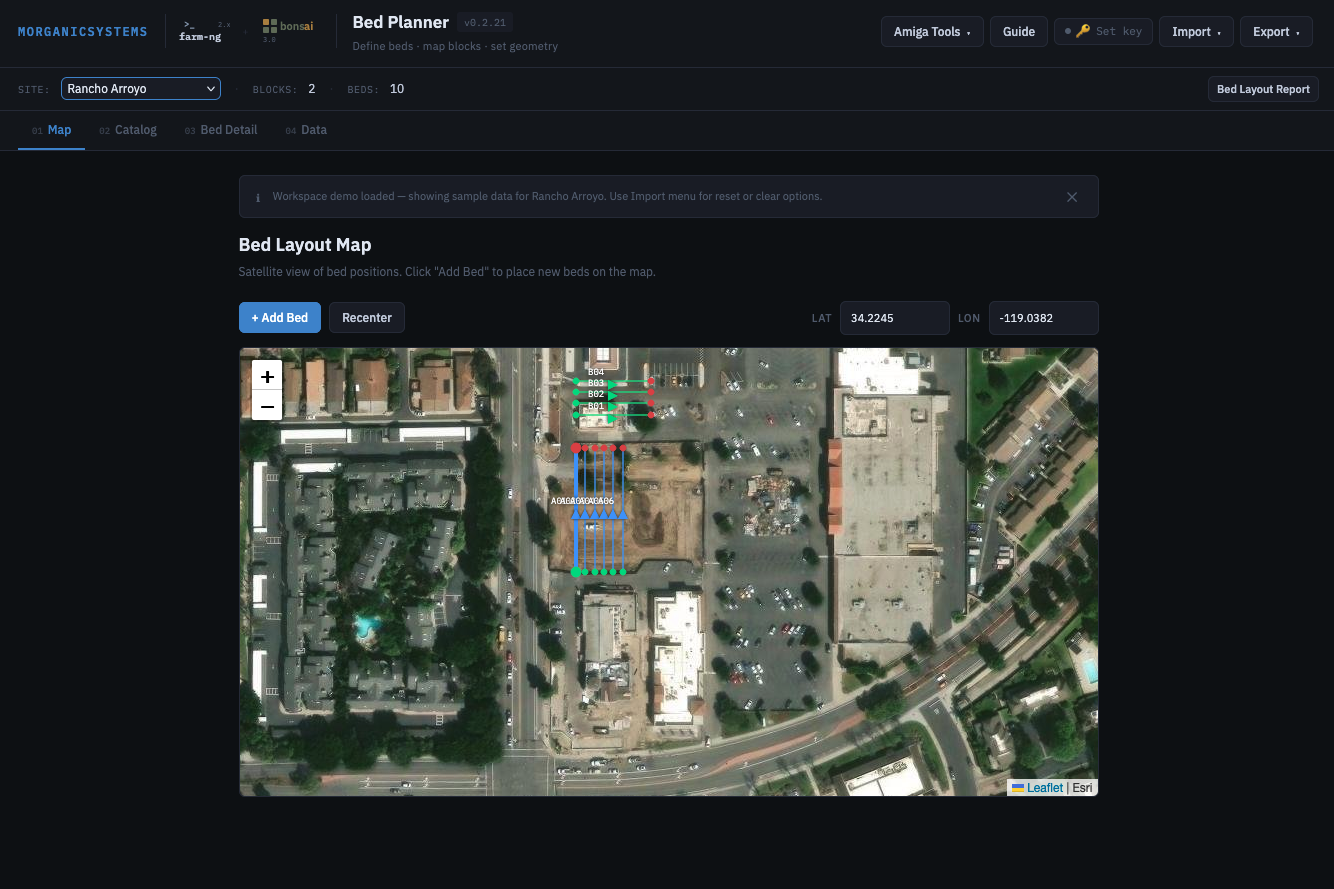
A browser-based field toolkit for agricultural robotics — machine readiness, site geometry, operational planning, and visit continuity. Four live tools share a unified workspace with encrypted backup and cross-tool context propagation, supporting both farm-ng V2.x and Bonsai V3.0 Amiga platforms.
Includes current field tooling and next-visit access/readout support. Operated as an independent MorganicSystems field toolkit, not an official Bonsai or farm-ng product.